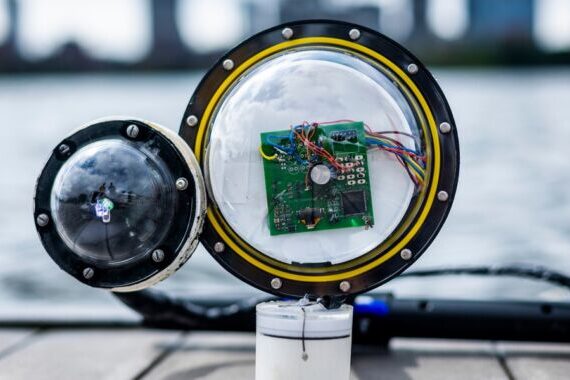
গবেষকরা একটি অক্টোপাস-অনুপ্রাণিত অক্টাগ্লোভ তৈরি করেছেন যা পানির নিচে বস্তুকে নিরাপদে আঁকড়ে ধরতে পারে। ক্রেডিট: ভার্জিনিয়া টেক
যেকোন উদ্ধারকারী ডুবুরি বা উদ্ধারকর্মী জানেন যে জলময় পরিবেশে পিচ্ছিল বস্তুগুলিকে ধরে রাখা কঠিন হতে পারে, বিশেষ করে যদি আরও সূক্ষ্ম স্পর্শের প্রয়োজন হয়। এই কারণেই বিজ্ঞানীরা অনুপ্রেরণার জন্য অক্টোপাসের দিকে তাকিয়েছিলেন যখন তারা একটি উপন্যাস “অক্টাগ্লোভ” তৈরি করছিলেন, যা জলের নিচের বস্তুগুলিকে আঁকড়ে ধরার জন্য একটি পরিধানযোগ্য সিস্টেম যা একটি অক্টোপাসের হাতের অনুকরণ করে। সাম্প্রতিক কাগজ সায়েন্স অ্যাডভান্সেস জার্নালে প্রকাশিত।
লেখকদের মতে, পানির নিচের পরিবেশে বস্তুর উপর আটকে রাখার কার্যকরী উপায়ের প্রকৃতিতে বেশ কয়েকটি উদাহরণ রয়েছে। উদাহরণস্বরূপ, ঝিনুকগুলি ভিজা পৃষ্ঠের সাথে নিজেদেরকে সংযুক্ত করার জন্য আঠালো প্রোটিন নিঃসরণ করে, যখন ব্যাঙের অনন্যভাবে গঠনযুক্ত পায়ের প্যাড থাকে যা আনুগত্যের জন্য কৈশিক এবং হাইড্রোডাইনামিক শক্তি তৈরি করে। কিন্তু অক্টোপাসের মতো সেফালোপডগুলির একটি বাড়তি সুবিধা রয়েছে: তাদের গ্রিপার দ্বারা সরবরাহ করা আনুগত্য দ্রুত এবং সহজেই বিপরীত হতে পারে, তাই প্রাণীরা ভিজা এবং শুষ্ক পৃষ্ঠের সাথে সংযুক্ত হয়ে পরিবর্তনশীল অবস্থার সাথে খাপ খাইয়ে নিতে পারে।
“যখন আমরা অক্টোপাসের দিকে তাকাই, আঠালো অবশ্যই আলাদা হয়ে যায়, দ্রুত সক্রিয় করে এবং চাহিদা অনুযায়ী আঠালো মুক্তি দেয়।” সহ-লেখক মাইকেল বার্টলেট বলেছেন, ভার্জিনিয়া টেকের একজন মেকানিক্যাল ইঞ্জিনিয়ার। “যদিও তেমনই মজার বিষয় হল, অক্টোপাসটি বিভিন্ন রাসায়নিক এবং যান্ত্রিক সেন্সর থেকে তথ্য প্রক্রিয়াকরণ করে আটটি বাহু জুড়ে 2,000 টিরও বেশি চুষককে নিয়ন্ত্রণ করে। অক্টোপাস সত্যিই আনুগত্য সুরযোগ্যতা, সংবেদনশীলতা এবং পানির নিচের বস্তুগুলিকে নিয়ন্ত্রণ করার জন্য একত্রিত করছে।”
একটি যান্ত্রিক প্রকৌশল দৃষ্টিকোণ থেকে, অক্টোপাসের আনুগত্যের জন্য একটি সক্রিয়, চাপ-চালিত সিস্টেম রয়েছে। চুষার প্রশস্ত বাইরের রিম চেম্বার এবং পার্শ্ববর্তী মাধ্যমের মধ্যে চাপের পার্থক্যের মাধ্যমে বস্তুর সাথে একটি সীলমোহর তৈরি করে। তারপরে পেশীগুলি (অ্যাকচুয়েটর হিসাবে পরিবেশন করা) সংকোচন করে এবং প্রয়োজন অনুসারে চাপ যোগ করতে বা ছেড়ে দেওয়ার জন্য রিমের পিছনে কাপ করা অংশটি শিথিল করে। উদাহরণস্বরূপ, নরম রোবোটিক গ্রিপার ডিজাইন করার সময় সেফালোপডগুলিকে নকল করার অনেক প্রচেষ্টা করা হয়েছে। বার্টলেট এবং তার সহকর্মীরা আরও এক ধাপ এগিয়ে যেতে চেয়েছিলেন এবং কেবল পরিবর্তনযোগ্য আনুগত্যই নয় বরং সমন্বিত সেন্সিং এবং নিয়ন্ত্রণও পুনরায় তৈরি করতে চেয়েছিলেন।
-
ভার্জিনিয়া টেক-এর মাইকেল বার্টলেট এই “অক্টা-গ্লোভ” ডিজাইন করেছেন, যা আপনাকে অক্টোপাস-সদৃশ চোষার ব্যবহার করে বস্তুগুলি তুলতে দেয়৷
মাইকেল বার্টলেট/ভার্জিনিয়া টেক
-
মাইকেল বার্টলেটের ল্যাব থেকে অক্টোপাস-অনুপ্রাণিত সেন্সরাইজড আঠালো সহ একটি প্রাকৃতিক অক্টোপাস আর্ম এবং একটি সিন্থেটিক বাহু শিল্পীর রেন্ডারিং।
ভার্জিনিয়া টেক
-
পরিধানযোগ্য অক্টাগ্লোভ প্রদর্শন করা হচ্ছে।
ভার্জিনিয়া টেক
-
OctaGlove নিয়ন্ত্রণ স্কিম এবং অপারেশন পরিকল্পিত.
ভার্জিনিয়া টেক
-
অক্টাগ্লোভ ল্যাবে পানির নিচে বিভিন্ন বস্তু তুলে নিচ্ছে।
ভার্জিনিয়া টেক
প্রথম ধাপটি ছিল নীতির প্রমাণ হিসাবে একটি মৌলিক অক্টোপাস-অনুপ্রাণিত পানির নিচের আঠালো সিস্টেম তৈরি করা। আনুগত্যের জন্য, তারা সিলিকন ডালপালা ডিজাইন করেছে বায়ুমণ্ডলীয়ভাবে নিয়ন্ত্রিত ঝিল্লি দিয়ে আবদ্ধ, অক্টোপাস সাকারের গঠন অনুকরণ করে। এই আঠালো উপাদানগুলি তখন LIDAR অপটিক্যাল প্রক্সিমিটি সেন্সর এবং বস্তুর রিয়েল-টাইম সনাক্তকরণের জন্য একটি মাইক্রো-কন্ট্রোলের সাথে একত্রিত হয়েছিল। যখন সেন্সরগুলি একটি বস্তু সনাক্ত করে, তখন আনুগত্য চালু হয়, অক্টোপাসের স্নায়ু এবং পেশীতন্ত্রের অনুকরণ করে।
পরবর্তী পদক্ষেপটি ছিল একটি পরিধানযোগ্য দস্তানাতে সিস্টেমটিকে অন্তর্ভুক্ত করা। দলটি ভিত্তি হিসাবে একটি নিওপ্রিন ওয়েটস্যুট গ্লাভ ব্যবহার করেছিল, আঠালো উপাদানগুলির গোড়ায় ঢোকানো নমনীয় বায়ুসংক্রান্ত টিউব সহ প্রতিটি আঙুলে আঠালো উপাদান (আয়তক্ষেত্রে কাটা) এবং সেন্সরগুলিকে অন্তর্ভুক্ত করে। সেন্সর নেটওয়ার্কের প্রতিক্রিয়ার প্রতিক্রিয়ায় বায়ুসংক্রান্ত সিস্টেম পরিচালনা করার জন্য একাধিক অপটিক্যাল সেন্সর একটি দ্বিমুখী মাল্টিপ্লেক্সারের মাধ্যমে একটি একক মাইক্রোকন্ট্রোলারের সাথে সংযুক্ত ছিল।
“এম্বেড করা ইলেকট্রনিক্সের সাথে নরম, প্রতিক্রিয়াশীল আঠালো উপকরণগুলিকে একত্রিত করে, আমরা চেপে না ধরেই বস্তুগুলিকে ধরতে পারি,” বার্টলেট বলেছেন. “এটি ভেজা বা পানির নিচের বস্তুগুলিকে পরিচালনা করাকে অনেক সহজ এবং আরও প্রাকৃতিক করে তোলে। ইলেকট্রনিক্সগুলি দ্রুত আনুগত্যকে সক্রিয় এবং ছেড়ে দিতে পারে। শুধু আপনার হাতকে একটি বস্তুর দিকে নিয়ে যান, এবং গ্লাভটি উপলব্ধি করার কাজ করে। এটি ব্যবহারকারীর চাপ ছাড়াই করা যেতে পারে। একক বোতাম।”
লেখকরা উল্লেখ করেছেন যে OctaGlove এর সিস্টেম অপটিক্যাল সেন্সর ব্যবহার করলেও রাসায়নিক বা যান্ত্রিক সেন্সিং সহ অন্যান্য সেন্সিং পদ্ধতি ব্যবহার করা সম্ভব। “এটি বিশেষভাবে আকর্ষণীয় হতে পারে, কারণ এটি জানা যায় যে অক্টোপাস ম্যানিপুলেশনের সময় দৃষ্টি, রাসায়নিক এবং যান্ত্রিক সংবেদনের একটি বৈচিত্র্যপূর্ণ সেট প্রদর্শন করে,” লেখক লিখেছেন। তারা OctaGlove এর ভবিষ্যত পুনরাবৃত্তিতে হ্যাপটিক প্রতিক্রিয়া অন্তর্ভুক্ত করতে চায় যাতে ব্যবহারকারীরা তাদের জলের নীচে গ্রিপিং প্রয়োজনের জন্য সিস্টেমটিকে আরও ভালভাবে কাস্টমাইজ করতে পারে।
বার্টলেট নিউ সায়েন্টিস্টকে বললেন. “তবে আমরা একটি তৈরি করতে পারি [robot] বাহু যা অনেকটা তাঁবুর মতো—আমরা আসলে এটিকে খুব বায়োমিমেটিক করে তুলতে পারি।”
DOI: সায়েন্স অ্যাডভান্সেস, 2022। 10.1126/sciadv.abq1905 (DOI সম্পর্কে)।
মাইকেল বার্টলেট/ভার্জিনিয়া টেক দ্বারা তালিকাভুক্ত চিত্র